The time and expense to have divers gather data and check conditions underwater can be costly. There are also areas where it may be difficult and dangerous for researchers to dive. We can avoid those dangers and reduce expenses by using remote operated vehicles (ROV) to explore these areas. The technology for unmanned underwater robots currently exists, but the cost is very prohibitive for the current work we do in the lab. With commercial ROV’s costing upwards of thousands of dollars, we sought ways to make our own ROV at a fraction of the cost.
Thanks to the open source community, we were able to accomplish our goal of having an Underwater ROV by building our own using the OpenROV project. The use of ARM CPU technology has given us the opportunity to build an underwater remote operated vehicle at the fraction of the cost of a commercial product.
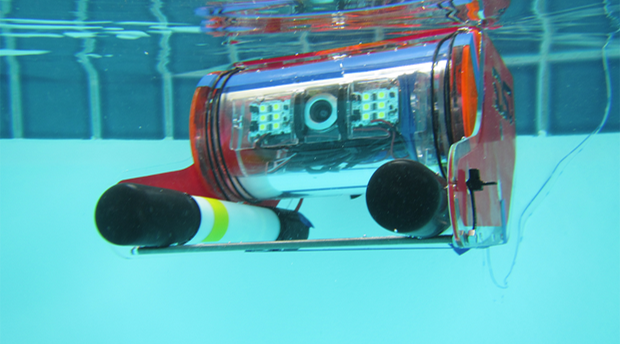
The biggest challenges when building the ROV came from waterproofing the vehicle. Since the entire project was built from scratch, cutting and assembling from raw materials, we had issues in sealing the battery compartments and cockpit housing. Some end-caps were loose and water was seeping through, albeit in very small amounts.
We rectified these issues by making adjustments to the measurements of our seals and permanently sealing areas where frequent adjustments to electronics were not needed. Another major issue is the use of a laptop to control the ROV under bright daylight conditions. Under the midday sun, viewing and controlling the ROV was difficult as the control is sent through the laptop screen. We were able to feed the controls through a tablet controller, which was easier to use in full daylight.
After several test runs, we were able to have our first successful launch, exploring the underside of the docks in Mission Bay, searching for sea squirts to be used in biology experiments.
For more information on the OpenROV and how to build your own, visit OpenROV.com!


Here is Our First Test:
And Our First Sortie: